LG Modern Lift Elevator Drive Board DPP-131 AEG02C267 พร้อมการควบคุมการขับเคลื่อนเครื่องดึงและการปฏิสัมพันธ์สัญญาณ
-
เน้น
DPP-131 AEG02C267 บอร์ดขับเคลื่อนลิฟท์
,บอร์ด PCB การควบคุมการขับเคลื่อนเครื่องดึง
,บอร์ดควบคุมลิฟท์การปฏิสัมพันธ์สัญญาณ
-
ยี่ห้อซัลบ์
-
คำอธิบายชิ้นส่วนลิฟต์
-
แบบอย่างDPP-131 AEG02C267
-
ขั้นต่ำ1 ชิ้น
-
การขนส่งTNT, UPS, DHL, FedEx, อากาศ, ทะเล
-
ใช้งานได้ลิฟต์
-
แพ็คเกจกล่อง, กล่องไม้, พาเลท ฯลฯ
-
เวลาการส่งมอบปกติ 2-3 วันทำการหลังการชำระเงิน
-
การรับประกันหนึ่งปี
-
วิธีการชำระเงินธนาคาร บริษัท , Western Union, Alibaba, Paypal ฯลฯ
-
ชื่อแบรนด์SULAB
-
หมายเลขรุ่นDPP-131 AEG02C267
-
จำนวนสั่งซื้อขั้นต่ำ1 ชิ้น
-
เวลาการส่งมอบปกติ 2-3 วันทำการหลังการชำระเงิน
-
เงื่อนไขการชำระเงินL/C, D/A, D/P, T/T ตะวันตกสหภาพ
LG Modern Lift Elevator Drive Board DPP-131 AEG02C267 พร้อมการควบคุมการขับเคลื่อนเครื่องดึงและการปฏิสัมพันธ์สัญญาณ
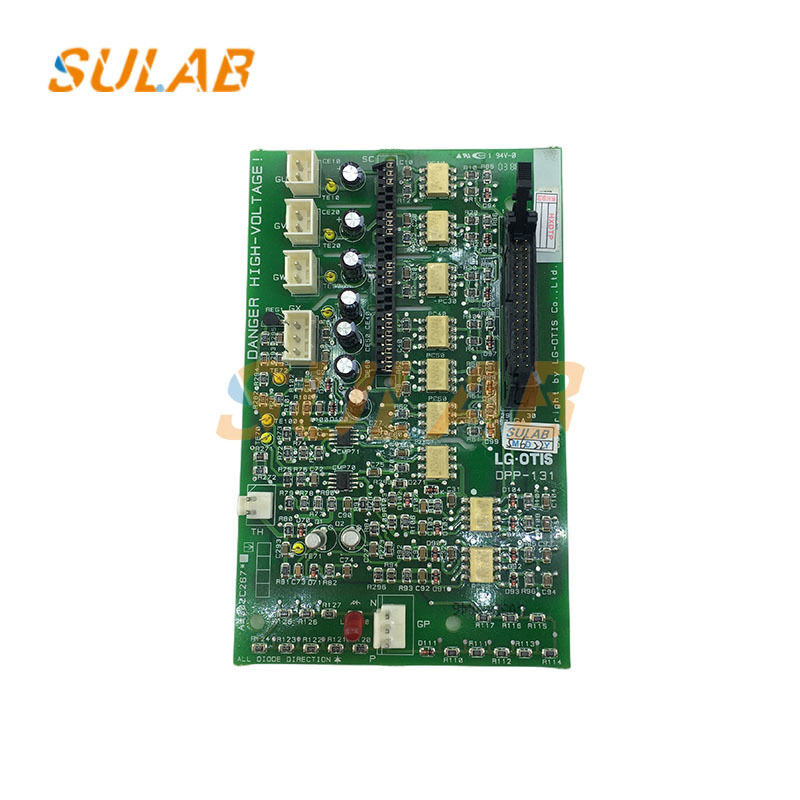
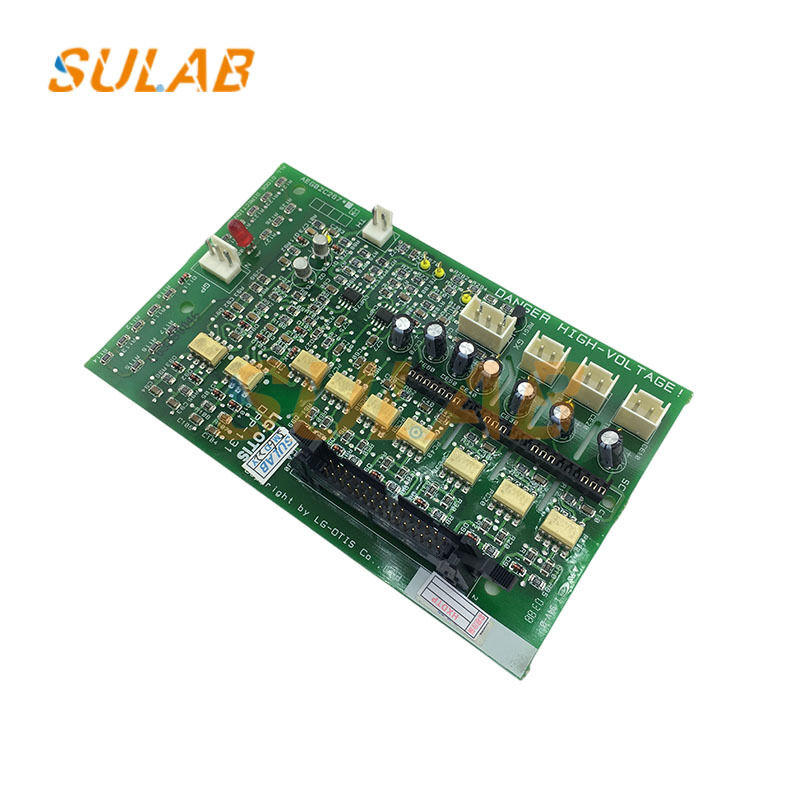

การออกแบบบอร์ดขับลิฟต์ LG Modern Lift, โมดูล PCB บอร์ดขับลิฟต์, บอร์ดควบคุมลิฟต์ DPP-131 AEG02C267
ฟังก์ชันหลัก
การควบคุมการขับเคลื่อนเครื่องฉุดลาก: ใช้แหล่งจ่ายไฟความถี่แปรผันที่เข้ากันได้เพื่อควบคุมความเร็วและแรงบิดของเครื่องฉุดลาก เพื่อให้มั่นใจถึงการเปลี่ยนผ่านที่ราบรื่นระหว่างการเริ่มต้นลิฟต์, การเร่งความเร็ว, ความเร็วคงที่, การลดความเร็ว และการหยุด, ตอบสนองความต้องการในการปฏิบัติงานระหว่างชั้นต่างๆ
การโต้ตอบสัญญาณและการดำเนินการคำสั่ง: รับคำสั่งการทำงานจากระบบควบคุมหลักของลิฟต์ เช่น สัญญาณเรียกและสัญญาณชั้น ในขณะเดียวกันก็ให้ข้อเสนอแนะเกี่ยวกับสถานะการทำงานของอินเวอร์เตอร์และมอเตอร์ เพื่อให้มั่นใจถึงการทำงานที่ประสานกันของส่วนประกอบทั้งหมด
การตรวจสอบและป้องกันสถานะการทำงาน: ตรวจสอบพารามิเตอร์ต่างๆ เช่น แรงดันไฟฟ้า กระแสไฟฟ้า และอุณหภูมิระหว่างการทำงานของลิฟต์แบบเรียลไทม์ โดยมีฟังก์ชันการป้องกันหลายอย่าง รวมถึงการป้องกันกระแสเกิน แรงดันไฟฟ้าเกิน โอเวอร์โหลด และความร้อนสูงเกินไป ปิดลิฟต์ทันทีในกรณีที่เกิดความผิดปกติ เพื่อให้มั่นใจถึงการทำงานที่ปลอดภัย
ปรับปรุงประสิทธิภาพและความสะดวกสบายในการทำงาน: ผ่านการควบคุมความถี่แปรผันที่แม่นยำ ลดการใช้พลังงานระหว่างการทำงานของลิฟต์ ลดการสั่นสะเทือนและเสียงรบกวน และเพิ่มความสะดวกสบายของผู้โดยสาร
| แบรนด์ | SULAB |
| คำอธิบาย | ลิฟต์ อะไหล่ |
| รุ่น | DPP-131 AEG02C267 |
| MOQ | 1 ชิ้น |
| การขนส่ง | TNT, UPS, DHL, Fedex, Air, Sea |
| ใช้งานได้ | ลิฟต์ |
| แพ็คเกจ | กล่อง, กล่องไม้, พาเลท ฯลฯ |
| เวลาจัดส่ง | โดยปกติ 2-3 วันทำการหลังจากการชำระเงิน |
| การรับประกัน | หนึ่งปี |
| วิธีการชำระเงิน | ธนาคารบริษัท, Western union, อาลีบาบา, Paypal ฯลฯ |
หลักการทำงาน
การแก้ไขและการกรอง: แปลงพลังงานไฟฟ้ากระแสสลับสามเฟสอินพุตเป็นพลังงานไฟฟ้ากระแสตรง และลดระลอกคลื่นในพลังงานไฟฟ้ากระแสตรงผ่านวงจรกรอง โดยให้แหล่งจ่ายไฟ DC ที่เสถียรสำหรับขั้นตอนอินเวอร์เตอร์ถัดไป
อินเวอร์เตอร์: ตามคำแนะนำของระบบควบคุมหลัก พลังงานไฟฟ้ากระแสตรงจะถูกแปลงเป็นพลังงานไฟฟ้ากระแสสลับสามเฟสที่มีความถี่และแรงดันไฟฟ้าที่ปรับได้โดยใช้อุปกรณ์ไฟฟ้า เช่น IGBTs โดยจ่ายให้กับมอเตอร์เครื่องฉุดลาก
การทำงานของตรรกะควบคุม: ไมโครโปรเซสเซอร์บนบอร์ดจะดำเนินการควบคุมตรรกะ เช่น ความเร็วและแรงบิดตามสถานะและคำแนะนำการทำงานของลิฟต์ โดยส่งสัญญาณควบคุมที่สอดคล้องกันเพื่อปรับเอาต์พุตของวงจรอินเวอร์เตอร์ ทำให้ได้การควบคุมความเร็วที่แม่นยำ
ข้อเสนอแนะและการปรับ: ได้รับข้อมูล เช่น ความเร็วและตำแหน่งของเครื่องฉุดลากผ่านอุปกรณ์ป้อนกลับ เช่น ตัวเข้ารหัส เปรียบเทียบกับค่าที่ตั้งไว้ และปรับเอาต์พุตแบบเรียลไทม์เพื่อให้มั่นใจถึงความถูกต้องและความเสถียรของการทำงานของลิฟต์
ผลิตภัณฑ์ของเรามีจำหน่ายทั่วโลก คุณสามารถวางใจได้ในกระบวนการผลิตทั้งหมดของเรา